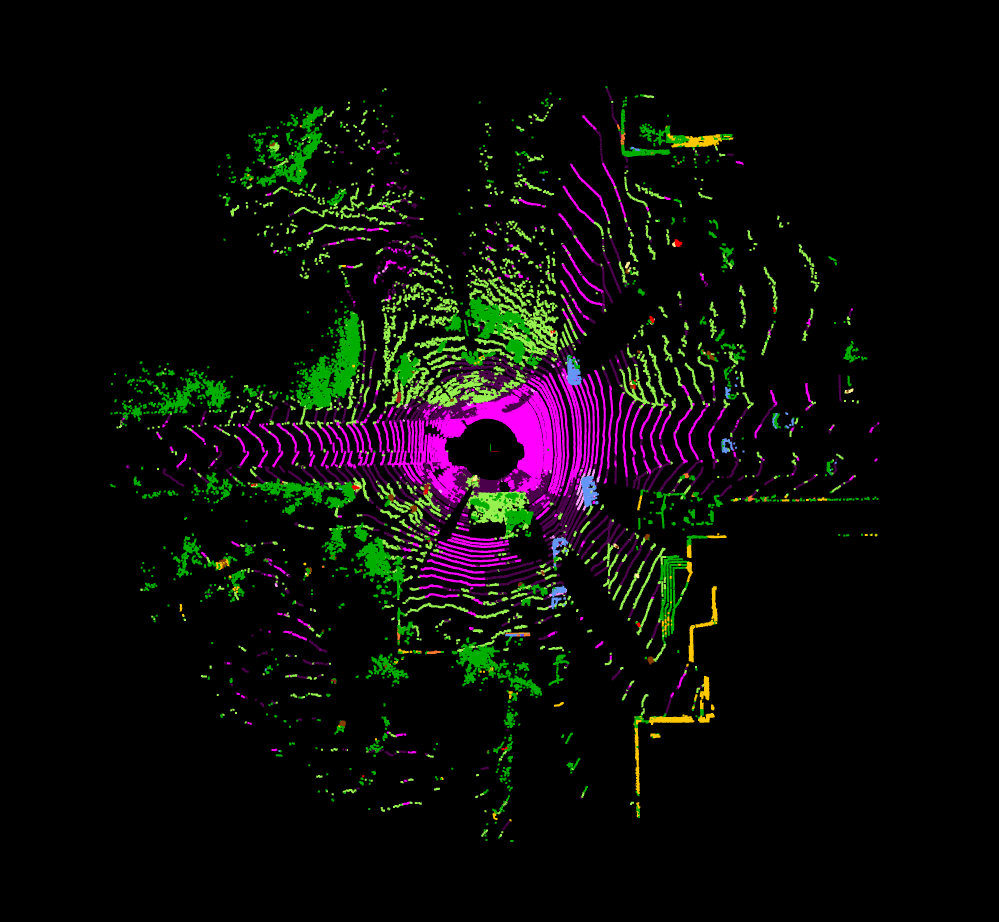
Academic Robot Reach Reinforcement Learning Trained a PPO reach goal policy for UR10 robot using IsaacLab. Human Segmentation Simulation on NVIDIA Isaac Sim A full Software-in-the-Loop (SIL) simulation using Isaac Sim and ROS2, where a Nova Carter robot equipped with a camera detects humans in real-time using a U-Net-based segmentation model. Synthetic Data Generation using Isaac Sim A simulation pipeline built in NVIDIA Isaac Sim to generate a synthetic warehouse dataset using domain randomization and train an object detection model using the TAO Toolkit. F1/10th Deep Racer Inspired by AWS Deepracer, developed and actor critic modeled car that could compete with a PID controller's lap times and safety. Improvement of Segmentation Algorithms using Attention and Loss Combinations Designed, trained, and evaluated LiDAR segmentation models (Cylinder3D and PointNet) with novel loss functions and attention-based enhancements on SemanticKITTI dataset using PyTorch and MMDetection3D. Autonomous F1/10th Car Utilized RRT, AMCL, Dead Reackoning and PID Controller on a 1D lidar enabled F1/10th car to win first place in an autonomous car race. AI Pet Robot An autonomous pet robot that can recognize, track, follow and interact with its owner. Image Classification Playground A No-Code platform for Training and Labeling Images, and Retraining Image Classification Models. Movie Base A Movie Ticket Booking website built using Python with Tkinter Interface. The application uses ODBC and can handle concurrent users. Meme-Analysis Analyse the corelation between people's personality and the kind of memes they find funny, dark or dank.